



Understanding deep learning requires familiarity with many simple mathematical concepts: tensors, tensor operations, differentiation, gradient descent, and so on. Our goal in this chapter will be to build up your intuition about these notions without getting overly technical. In particular, we’ll steer away from mathematical notation, which can introduce unnecessary barriers for those without any mathematics background, and isn’t necessary to explain things well. The most precise, unambiguous description of a mathematical operation is its executable code.
To provide sufficient context for introducing tensors and gradient descent, we’ll begin the chapter with a practical example of a neural network. Then we’ll go over every new concept that’s been introduced, point by point. Keep in mind that these concepts will be essential for you to understand the practical examples that will come in the following chapters!
After reading this chapter, you’ll have an intuitive understanding of the mathematical theory behind deep learning, and you’ll be ready to start diving into modern deep learning frameworks, in chapter 3.
A first look at a neural network
Let’s look at a concrete example of a neural network that uses the machine learning library Keras to learn to classify handwritten digits. We will use Keras extensively throughout this book. It’s a simple, high-level library that will allow us to stay focused on the concepts we would like to cover.
Unless you already have experience with Keras or similar libraries, you won’t understand everything about this first example right away. That’s fine. In a few sections, we’ll review each element in the example and explain it in detail. So don’t worry if some steps seem arbitrary or look like magic to you! We’ve got to start somewhere.
The problem we’re trying to solve here is to classify grayscale images of handwritten digits (28 × 28 pixels) into their 10 categories (0 through 9). We’ll use the MNIST dataset, a classic in the machine learning community, which has been around almost as long as the field itself and has been intensively studied. It’s a set of 60,000 training images, plus 10,000 test images, assembled by the National Institute of Standards and Technology (the NIST in MNIST) in the 1980s. You can think of “solving” MNIST as the “Hello World” of deep learning — it’s what you do to verify that your algorithms are working as expected. As you become a machine learning practitioner, you’ll see MNIST come up over and over again, in scientific papers, blog posts, and so on. You can see some MNIST samples in figure 2.1.
The MNIST dataset comes preloaded in Keras, in the form of a set of four NumPy arrays.
from keras.datasets import mnist
(train_images, train_labels), (test_images, test_labels) = mnist.load_data()
train_images and train_labels form the training set,
the data that the model will learn from. The model will then be tested
on the test set, test_images and test_labels.
The images are encoded as NumPy arrays, and the labels are an array of digits,
ranging from 0 to 9. The images and labels have a one-to-one correspondence.
Let’s look at the training data:
>>> train_images.shape(60000, 28, 28)>>> len(train_labels)60000>>> train_labelsarray([5, 0, 4, ..., 5, 6, 8], dtype=uint8)
And here’s the test data:
>>> test_images.shape(10000, 28, 28)>>> len(test_labels)10000>>> test_labelsarray([7, 2, 1, ..., 4, 5, 6], dtype=uint8)
The workflow will be as follows. First, we’ll feed the neural network the
training data, train_images and train_labels. The network will then learn
to associate images and labels. Finally, we’ll ask the network to produce
predictions for test_images, and we’ll verify whether these predictions
match the labels from test_labels.
Let’s build the network — again, remember that you aren’t expected to understand everything about this example yet.
import keras
from keras import layers
model = keras.Sequential(
[
layers.Dense(512, activation="relu"),
layers.Dense(10, activation="softmax"),
]
)
The core building block of neural networks is the layer. You can think of a layer as a filter for data: some data goes in, and it comes out in a more useful form. Specifically, layers extract representations out of the data fed into them — hopefully, representations that are more meaningful for the problem at hand. Most of deep learning consists of chaining together simple layers that will implement a form of progressive data distillation. A deep learning model is like a sieve for data processing, made of a succession of increasingly refined data filters — the layers.
Here, our model consists of a sequence of two Dense layers, which
are densely connected (also called fully connected) neural layers.
The second (and last) layer is a 10-way softmax classification layer,
which means it will return an array of 10 probability scores (summing to 1).
Each score will be the probability that the current digit image belongs
to one of our 10 digit classes.
To make the model ready for training, we need to pick three more things, as part of the compilation step:
- A loss function — How the model will be able to measure its performance on the training data and thus how it will be able to steer itself in the right direction.
- An optimizer — The mechanism through which the model will update itself based on the training data it sees, to improve its performance.
- Metrics to monitor during training and testing — Here, we’ll only care about accuracy (the fraction of the images that were correctly classified).
The exact purpose of the loss function and the optimizer will be made clear throughout the next two chapters.
model.compile(
optimizer="adam",
loss="sparse_categorical_crossentropy",
metrics=["accuracy"],
)
Before training, we’ll preprocess the data by reshaping it into the shape the
model expects and scaling it so that all values are in the [0, 1] interval.
Previously, our training images were stored in an array of
shape (60000, 28, 28) of type uint8 with values in the [0, 255] interval.
We transform it into a float32 array of shape (60000, 28 * 28)
with values between 0 and 1.
train_images = train_images.reshape((60000, 28 * 28))
train_images = train_images.astype("float32") / 255
test_images = test_images.reshape((10000, 28 * 28))
test_images = test_images.astype("float32") / 255
We’re now ready to train the model, which in Keras is done via a call
to the model’s fit() method — we fit the model to its training data.
model.fit(train_images, train_labels, epochs=5, batch_size=128)
Two quantities are displayed during training: the loss of the model over the training data and the accuracy of the model over the training data. We quickly reach an accuracy of 0.989 (98.9%) on the training data.
Now that we have a trained model, we can use it to predict class probabilities for new digits — images that weren’t part of the training data, like those from the test set.
>>> test_digits = test_images[0:10] >>> predictions = model.predict(test_digits) >>> predictions[0]array([1.0726176e-10, 1.6918376e-10, 6.1314843e-08, 8.4106023e-06, 2.9967067e-11, 3.0331331e-09, 8.3651971e-14, 9.9999106e-01, 2.6657624e-08, 3.8127661e-07], dtype=float32)
Each number of index i in that array corresponds to the probability that
digit image test_digits[0] belong to class i.
This first test digit has the highest probability score (0.99999106, almost 1) at index 7, so according to our model, it must be a 7:
>>> predictions[0].argmax()7>>> predictions[0][7]0.99999106
We can check that the test label agrees:
>>> test_labels[0]7
On average, how good is our model at classifying such never-before-seen digits? Let’s check by computing average accuracy over the entire test set.
>>> test_loss, test_acc = model.evaluate(test_images, test_labels) >>> print(f"test_acc: {test_acc}")test_acc: 0.9785
The test set accuracy turns out to be 97.8% — that’s almost double the error rate of the training set (at 98.9% accuracy). This gap between training accuracy and test accuracy is an example of overfitting: the fact that machine learning models tend to perform worse on new data than on their training data. Overfitting is a central topic in chapter 5.
This concludes our first example. You just saw how you can build and train a neural network to classify handwritten digits in less than 15 lines of Python code. In this chapter and the next, we’ll go into detail about every moving piece we just previewed and clarify what’s going on behind the scenes. You’ll learn about tensors, the data-storing objects going into the model; tensor operations, which layers are made of; and gradient descent, which allows your model to learn from its training examples.
Data representations for neural networks
In the previous example, we started from data stored in multidimensional NumPy arrays, also called tensors. In general, all current machine learning systems use tensors as their basic data structure. Tensors are fundamental to the field — so fundamental that the TensorFlow framework was named after them. So what’s a tensor?
At its core, a tensor is a container for data — usually numerical data. So it’s a container for numbers. You may already be familiar with matrices, which are rank-2 tensors: tensors are a generalization of matrices to an arbitrary number of dimensions (note that in the context of tensors, a dimension is often called an axis).
Going over the details of tensors might seem a bit abstract at first. But it’s well worth it — manipulating tensors will be the bread and butter of any machine learning code you ever write.
Scalars (rank-0 tensors)
A tensor that contains only one number is called
a scalar (or scalar tensor, rank-0 tensor, or 0D tensor).
In NumPy, a float32 or float64 number is a scalar tensor (or scalar array).
You can display the number of axes of a NumPy tensor via
the ndim attribute; a scalar tensor has 0 axes (ndim == 0).
The number of axes of a tensor is also called its rank.
Here’s a NumPy scalar:
>>> import numpy as np >>> x = np.array(12) >>> xarray(12)>>> x.ndim0
Vectors (rank-1 tensors)
An array of numbers is called a vector (or rank-1 tensor or 1D tensor). A rank-1 tensor has exactly one axis. The following is a NumPy vector:
>>> x = np.array([12, 3, 6, 14, 7]) >>> xarray([12, 3, 6, 14, 7])>>> x.ndim1
This vector has five entries and so is called a 5-dimensional vector. Don’t confuse a 5D vector with a 5D tensor! A 5D vector has only one axis and has five dimensions along its axis, whereas a 5D tensor has five axes (and may have any number of dimensions along each axis). Dimensionality can denote either the number of entries along a specific axis (as in the case of our 5D vector) or the number of axes in a tensor (such as a 5D tensor), which can be confusing at times. In the latter case, it’s technically more correct to talk about a tensor of rank 5 (the rank of a tensor being the number of axes), but the ambiguous notation 5D tensor is common regardless.
Matrices (rank-2 tensors)
An array of vectors is a matrix (or rank-2 tensor or 2D tensor). A matrix has two axes (often referred to as rows and columns). You can visually interpret a matrix as a rectangular grid of numbers. This is a NumPy matrix:
>>> x = np.array([[5, 78, 2, 34, 0], ... [6, 79, 3, 35, 1], ... [7, 80, 4, 36, 2]]) >>> x.ndim2
The entries from the first axis are called the rows, and the entries
from the second axis are called the columns. In the previous example,
[5, 78, 2, 34, 0] is the first row of x,
and [5, 6, 7] is the first column.
Rank-3 tensors and higher-rank tensors
If you pack such matrices in a new array, you obtain a rank-3 tensor (or 3D tensor), which you can visually interpret as a cube of numbers. The following is a NumPy rank-3 tensor:
>>> x = np.array([[[5, 78, 2, 34, 0], ... [6, 79, 3, 35, 1], ... [7, 80, 4, 36, 2]], ... [[5, 78, 2, 34, 0], ... [6, 79, 3, 35, 1], ... [7, 80, 4, 36, 2]], ... [[5, 78, 2, 34, 0], ... [6, 79, 3, 35, 1], ... [7, 80, 4, 36, 2]]]) >>> x.ndim3
By packing rank-3 tensors in an array, you can create a rank-4 tensor, and so on. In deep learning, you’ll generally manipulate tensors with ranks 0 to 4, although you may go up to 5 if you process video data.
Key attributes
A tensor is defined by three key attributes:
- Number of axes (rank) — For instance, a rank-3 tensor has three axes,
and a matrix has two axes. This is also called the tensor’s
ndimin Python libraries such as NumPy, JAX, TensorFlow, and PyTorch.
- Shape — This is a tuple of integers that describes how many dimensions
the tensor has along each axis. For instance, the previous matrix example has
shape
(3, 5), and the rank-3 tensor example has shape(3, 3, 5). A vector has a shape with a single element, such as(5,), whereas a scalar has an empty shape,().
- Data type (usually called
dtypein Python libraries) — This is the type of the data contained in the tensor; for instance, a tensor’s type could befloat16,float32,float64,uint8,bool, and so on. In TensorFlow, you are also likely to come acrossstringtensors.
To make this more concrete, let’s look back at the data we processed in the MNIST example. First, we load the MNIST dataset:
from keras.datasets import mnist
(train_images, train_labels), (test_images, test_labels) = mnist.load_data()
Next, we display the number of axes of the tensor train_images,
the ndim attribute:
>>> train_images.ndim3
Here’s its shape:
>>> train_images.shape(60000, 28, 28)
And this is its data type, the dtype attribute:
>>> train_images.dtypeuint8
So what we have here is a rank-3 tensor of 8-bit integers. More precisely, it’s an array of 60,000 matrices of 28 × 28 integers. Each such matrix is a grayscale image, with coefficients between 0 and 255.
Let’s display the fourth digit in this rank-3 tensor, using the library Matplotlib (part of the standard scientific Python suite); see figure 2.2.
import matplotlib.pyplot as plt
digit = train_images[4]
plt.imshow(digit, cmap=plt.cm.binary)
plt.show()
Naturally, the corresponding label is just the integer 9:
>>> train_labels[4]9
Manipulating tensors in NumPy
In the previous example,
we selected a specific digit alongside the first axis using the syntax
train_images[i]. Selecting specific elements in a tensor is called
tensor slicing. Let’s look at the tensor-slicing operations you can do on
NumPy arrays.
The following example selects digits #10 to #100 (#100 isn’t included)
and puts them in an array of shape (90, 28, 28):
>>> my_slice = train_images[10:100] >>> my_slice.shape(90, 28, 28)
It’s equivalent to this more detailed notation,
which specifies a start index and stop index for the
slice along each tensor axis. Note that : is equivalent to selecting
the entire axis:
>>> # Equivalent to the previous example >>> my_slice = train_images[10:100, :, :] >>> my_slice.shape(90, 28, 28)>>> # Also equivalent to the previous example >>> my_slice = train_images[10:100, 0:28, 0:28] >>> my_slice.shape(90, 28, 28)
In general, you may select slices between any two indices along each tensor axis. For instance, to select 14 × 14 pixels in the bottom-right corner of all images, you would do this:
my_slice = train_images[:, 14:, 14:]
It’s also possible to use negative indices. Much like negative indices in Python lists, they indicate a position relative to the end of the current axis. To crop the images to patches of 14 × 14 pixels centered in the middle, do this:
my_slice = train_images[:, 7:-7, 7:-7]
The notion of data batches
In general, the first axis (axis 0, because indexing starts at 0) in all data tensors you’ll come across in deep learning will be the samples axis. In the MNIST example, “samples” are images of digits.
In addition, deep learning models don’t process an entire dataset at once; rather, they break the data into small “batches,” or groups of samples with a fixed size. Concretely, here’s one batch of our MNIST digits, with a batch size of 128:
batch = train_images[:128]
And here’s the next batch:
batch = train_images[128:256]
And the nth batch:
n = 3
batch = train_images[128 * n : 128 * (n + 1)]
When considering such a batch tensor, the first axis (axis 0) is called the batch axis (or batch dimension). You’ll frequently encounter this term when using Keras and other deep learning libraries.
Real-world examples of data tensors
Let’s make data tensors more concrete with a few examples similar to what you’ll encounter later. The data you’ll manipulate will almost always fall into one of the following categories:
- Vector data — Rank-2 tensors of shape
(samples, features), where each sample is a vector of numerical attributes (“features”) - Timeseries data or sequence data — Rank-3 tensors of shape
(samples, timesteps, features), where each sample is a sequence (of lengthtimesteps) of feature vectors - Images — Rank-4 tensors of shape
(samples, height, width, channels), where each sample is a 2D grid of pixels, and each pixel is represented by a vector of values (“channels”) - Video — Rank-5 tensors of shape
(samples, frames, height, width, channels), where each sample is a sequence (of lengthframes) of images
Vector data
Vector data is one of the most common cases. In such a dataset, each single data point can be encoded as a vector, and thus a batch of data will be encoded as a rank-2 tensor (that is, an array of vectors), where the first axis is the samples axis and the second axis is the features axis.
Let’s take a look at two examples:
- An actuarial dataset of people, where we consider each person’s age, gender,
and income. Each person can be characterized as a vector of three values,
and thus an entire dataset of 100,000 people can be stored in a rank-2 tensor
of shape
(100000, 3).
- A dataset of text documents, where we represent each document by the counts
of how many times each word appears in it
(out of a dictionary of 20,000 common words).
Each document can be encoded as a vector of 20,000 values
(one count per word in the dictionary), and thus an entire dataset of
500 documents can be stored in a tensor of shape
(500, 20000).
Timeseries data or sequence data
Whenever time matters in your data (or the notion of sequence order), it makes sense to store it in a rank-3 tensor with an explicit time axis. Each sample can be encoded as a sequence of vectors (a rank-2 tensor), and thus a batch of data will be encoded as a rank-3 tensor (see figure 2.3).
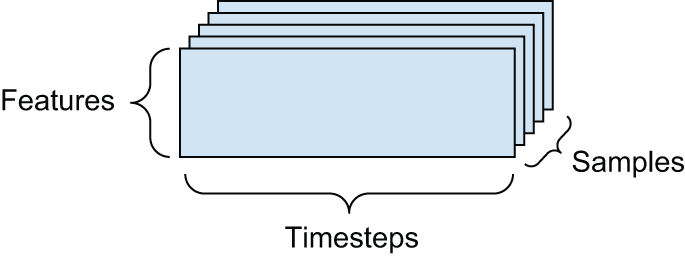
The time axis is always the second axis (axis of index 1), by convention. Let’s look at a few examples:
- A dataset of stock prices — Every minute, we store the current price
of the stock, the highest price in the past minute, and the lowest price
in the past minute. Thus every minute is encoded as a 3D vector,
an entire day of trading is encoded as a matrix of shape
(390, 3)(there are 390 minutes in a trading day), and 250 days’ worth of data can be stored in a rank-3 tensor of shape(250, 390, 3). Here, each sample would be one day’s worth of data.
- A dataset of tweets, where we encode each tweet as a sequence of 280 characters
out of an alphabet of 128 unique characters — In this setting, each character
can be encoded as a binary vector of size 128
(an all-zeros vector except for a 1 entry at
the index corresponding to the character).
Then each tweet can be encoded as a rank-2 tensor of shape
(280, 128), and a dataset of 1 million tweets can be stored in a tensor of shape(1000000, 280, 128).
Image data
Images typically have three dimensions: height, width, and color depth.
Although grayscale images (like our MNIST digits) have only a single color
channel and could thus be stored in rank-2 tensors, by convention image tensors
are always rank-3, with a one-dimensional color channel for grayscale images.
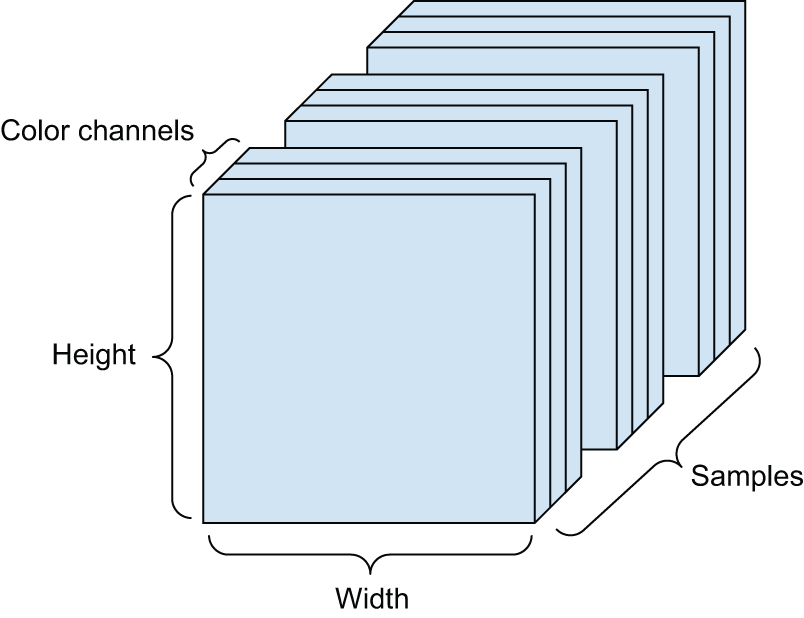
A batch of 128 grayscale images of size 256 × 256 could thus be stored
in a tensor of shape (128, 256, 256, 1), and a batch of 128 color images
could be stored in a tensor of shape (128, 256, 256, 3) (see figure 2.4).
There are two conventions for the shapes of image tensors: the channels-last convention (which is standard in JAX and TensorFlow, as well as most other deep learning tools out there) and the channels-first convention (which is standard in PyTorch).
The channels-last convention places the color-depth axis at the end:
(samples, height, width, color_depth). Meanwhile, the channels-first
convention places the color depth axis right after the batch axis:
(samples, color_depth, height, width). With the channels-first convention,
the previous examples would become (128, 1, 256, 256)
and (128, 3, 256, 256). The Keras API provides support for both formats.
Video data
Video data is one of the few types of real-world data for which you’ll
need rank-5 tensors. A video can be understood as a sequence of frames,
each frame being a color image. Because each frame can be stored
in a rank-3 tensor (height, width, color_depth), a sequence of frames
can be stored in a rank-4 tensor (frames, height, width, color_depth),
and thus a batch of different videos can be stored in a rank-5 tensor
of shape (samples, frames, height, width, color_depth).
For instance, a 60-second, 144 × 256 YouTube video clip sampled at
4 frames per second would have 240 frames. A batch of four such video clips
would be stored in a tensor of shape (4, 240, 144, 256, 3).
That’s a total of 106,168,320 values! If the dtype of the tensor
was float32, then each value would be stored in 32 bits, so the tensor
would represent 425 MB. Heavy! Videos you encounter in real life
are much lighter because they aren’t stored in float32 and they’re
typically compressed by a large factor (such as the MPEG format).
The gears of neural networks: Tensor operations
Just like any computer program can be ultimately reduced to a small set of
binary operations on binary inputs (AND, OR, NOR, and so on),
all transformations learned by deep neural networks can be reduced
to a handful of tensor operations (or tensor functions)
applied to tensors of numeric data.
For instance, it’s possible to add tensors, multiply tensors, and so on.
In our initial example, we were building our model by stacking Dense layers
on top of each other. A Keras layer instance looks like this:
keras.layers.Dense(512, activation="relu")
This layer can be interpreted as a function, which takes as input a matrix
and returns another matrix — a new representation for the input tensor.
Specifically, the function is as follows (where W is a matrix and b
is a vector, both attributes of the layer):
output = relu(matmul(input, W) + b)
Let’s unpack this. We have three tensor operations here:
- A tensor product (
matmul) between the input tensor and a tensor namedW. - An addition (
+) between the resulting matrix and a vectorb. - A
reluoperation:relu(x)ismax(x, 0)."relu"stands for “REctified Linear Unit.”
Element-wise operations
The relu operation and addition are element-wise operations: operations
that are applied independently to each entry in the tensors being considered.
This means these operations are highly amenable to massively parallel
implementations (vectorized implementations, a term that comes from
the vector processor supercomputer architecture from the 1970–1990 period).
If you want to write a naive Python implementation of an element-wise operation,
you use a for loop, as in this naive implementation of an element-wise relu
operation:
def naive_relu(x):
# x is a rank-2 NumPy tensor.
assert len(x.shape) == 2
# Avoids overwriting the input tensor
x = x.copy()
for i in range(x.shape[0]):
for j in range(x.shape[1]):
x[i, j] = max(x[i, j], 0)
return x
You could do the same for addition:
def naive_add(x, y):
# x and y are rank-2 NumPy tensors.
assert len(x.shape) == 2
assert x.shape == y.shape
# Avoids overwriting the input tensor
x = x.copy()
for i in range(x.shape[0]):
for j in range(x.shape[1]):
x[i, j] += y[i, j]
return x
On the same principle, you can do element-wise multiplication, subtraction, and so on.
In practice, when dealing with NumPy arrays, these operations are available as well-optimized built-in NumPy functions, which themselves delegate the heavy lifting to a Basic Linear Algebra Subprograms (BLAS) implementation. BLAS are low-level, highly parallel, efficient tensor-manipulation routines that are typically implemented in Fortran or C.
So, in NumPy, you can do the following element-wise operation, and it will be blazing fast:
import numpy as np
# Element-wise addition
z = x + y
# Element-wise relu
z = np.maximum(z, 0.0)
Let’s actually time the difference:
import time
x = np.random.random((20, 100))
y = np.random.random((20, 100))
t0 = time.time()
for _ in range(1000):
z = x + y
z = np.maximum(z, 0.0)
print("Took: {0:.2f} s".format(time.time() - t0))
This takes 0.02 seconds. Meanwhile, the naive version takes a stunning 2.45 seconds:
t0 = time.time()
for _ in range(1000):
z = naive_add(x, y)
z = naive_relu(z)
print("Took: {0:.2f} s".format(time.time() - t0))
Likewise, when running JAX/TensorFlow/PyTorch code on a GPU, element-wise operations are executed via fully vectorized CUDA implementations that can best utilize the highly parallel GPU chip architecture.
Broadcasting
Our earlier naive implementation of naive_add only supports the addition
of rank-2 tensors with identical shapes. But in the Dense layer
introduced earlier, we added a rank-2 tensor with a vector. What happens with
addition when the shapes of the two tensors being added differ?
When possible, and if there’s no ambiguity, the smaller tensor will be broadcast to match the shape of the larger tensor. Broadcasting consists of two steps:
- Axes (called broadcast axes) are added to the smaller tensor to match
the
ndimof the larger tensor. - The smaller tensor is repeated alongside these new axes to match the full shape of the larger tensor.
Let’s look at a concrete example. Consider X with shape (32, 10) and y
with shape (10,):
import numpy as np
# X is a random matrix with shape (32, 10).
X = np.random.random((32, 10))
# y is a random vector with shape (10,).
y = np.random.random((10,))
First, we add an empty first axis to y, whose shape
becomes (1, 10):
# The shape of y is now (1, 10).
y = np.expand_dims(y, axis=0)
Then, we repeat y 32 times alongside this new axis,
so that we end up with a tensor Y with shape (32, 10), where Y[i, :] == y
for i in range(0, 32):
# Repeat y 32 times along axis 0 to obtain Y with shape (32, 10).
Y = np.tile(y, (32, 1))
At this point, we can add X and Y
because they have the same shape.
In terms of implementation, no new rank-2 tensor is created because that would be terribly inefficient. The repetition operation is entirely virtual: it happens at the algorithmic level rather than at the memory level. But thinking of the vector being repeated 32 times alongside a new axis is a helpful mental model. Here’s what a naive implementation would look like:
def naive_add_matrix_and_vector(x, y):
# x is a rank-2 NumPy tensor.
assert len(x.shape) == 2
# y is a NumPy vector.
assert len(y.shape) == 1
assert x.shape[1] == y.shape[0]
# Avoids overwriting the input tensor
x = x.copy()
for i in range(x.shape[0]):
for j in range(x.shape[1]):
x[i, j] += y[j]
return x
With broadcasting, you can generally apply two-tensor element-wise operations
if one tensor has shape (a, b, … n, n + 1, … m) and the other has shape
(n, n + 1, … m). The broadcasting will then automatically happen
for axes a through n - 1.
The following example applies the element-wise maximum operation
to two tensors of different shapes via broadcasting:
import numpy as np
# x is a random tensor with shape (64, 3, 32, 10).
x = np.random.random((64, 3, 32, 10))
# y is a random tensor with shape (32, 10).
y = np.random.random((32, 10))
# The output z has shape (64, 3, 32, 10) like x.
z = np.maximum(x, y)
Tensor product
The tensor product, also called dot product or matmul (short for “matrix multiplication”) is one of the most common, most useful tensor operations.
In NumPy, a tensor product is done using the np.matmul function, and in
Keras, with the keras.ops.matmul function. Its shorthand is the @ operator in Python:
x = np.random.random((32,))
y = np.random.random((32,))
# Takes the product between x and y
z = np.matmul(x, y)
# This is equivalent.
z = x @ y
In mathematical notation, you’d note the operation with a dot (•) (hence the name “dot product”):
z = x • y
Mathematically, what does the matmul operation do? Let’s start with
the product of two vectors x and y. It’s computed as follows:
def naive_vector_product(x, y):
# x and y are NumPy vectors.
assert len(x.shape) == 1
assert len(y.shape) == 1
assert x.shape[0] == y.shape[0]
z = 0.0
for i in range(x.shape[0]):
z += x[i] * y[i]
return z
You’ll have noticed that the product between two vectors is a scalar and that only vectors with the same number of elements are compatible for this operation.
You can also take the product between a matrix x and a vector y,
which returns a vector where the coefficients are the products between
y and the rows of x. You implement it as follows:
def naive_matrix_vector_product(x, y):
# x is a NumPy matrix.
assert len(x.shape) == 2
# y is a NumPy vector.
assert len(y.shape) == 1
# The 1st dimension of x must equal the 0th dimension of y!
assert x.shape[1] == y.shape[0]
# This operation returns a vector of 0s with as many rows as x.
z = np.zeros(x.shape[0])
for i in range(x.shape[0]):
for j in range(x.shape[1]):
z[i] += x[i, j] * y[j]
return z
You could also reuse the code we wrote previously, which highlights the relationship between a matrix-vector product and a vector product:
def naive_matrix_vector_product(x, y):
z = np.zeros(x.shape[0])
for i in range(x.shape[0]):
z[i] = naive_vector_product(x[i, :], y)
return z
Note that as soon as one of the two tensors has an ndim greater than 1,
matmul is no longer symmetric, which is to say that matmul(x, y) isn’t
the same as matmul(y, x).
Of course, a tensor product generalizes to tensors with an arbitrary number
of axes. The most common applications may be the product between
two matrices. You can take the product of two matrices x and y
(matmul(x, y)) if and only if x.shape[1] == y.shape[0].
The result is a matrix with shape (x.shape[0], y.shape[1]),
where the coefficients are the vector products between the rows of x
and the columns of y. Here’s the naive implementation:
def naive_matrix_product(x, y):
# x and y are NumPy matrices.
assert len(x.shape) == 2
assert len(y.shape) == 2
# The 1st dimension of x must equal the 0th dimension of y!
assert x.shape[1] == y.shape[0]
# This operation returns a matrix of 0s with a specific shape.
z = np.zeros((x.shape[0], y.shape[1]))
# Iterates over the rows of x ...
for i in range(x.shape[0]):
# ... and over the columns of y.
for j in range(y.shape[1]):
row_x = x[i, :]
column_y = y[:, j]
z[i, j] = naive_vector_product(row_x, column_y)
return z
To understand vector product shape compatibility, it helps to visualize the input and output tensors by aligning them as shown in figure 2.5.
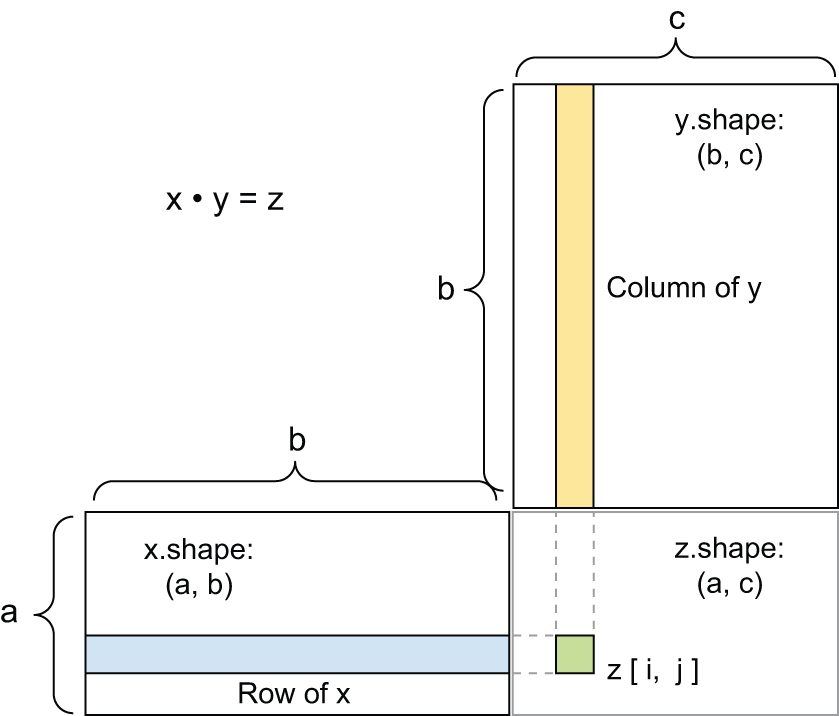
x, y, and z are pictured as rectangles (literal boxes of coefficients).
Because the rows of x and the columns of y must have the same size,
it follows that the width of x must match the height of y.
If you go on to develop new machine learning algorithms,
you’ll likely be drawing such diagrams often.
More generally, you can take the product between higher-dimensional tensors, following the same rules for shape compatibility as outlined earlier for the 2D case:
(a, b, c, d) • (d,) -> (a, b, c)
(a, b, c, d) • (d, e) -> (a, b, c, e)
And so on.
Tensor reshaping
A third type of tensor operation
that’s essential to understand is tensor reshaping. Although it wasn’t
used in the Dense layers in our first neural network example,
we used it when we preprocessed the digits data before feeding it
into our model:
train_images = train_images.reshape((60000, 28 * 28))
Reshaping a tensor means rearranging its rows and columns to match a target shape. Naturally, the reshaped tensor has the same total number of coefficients as the initial tensor. Reshaping is best understood via simple examples:
>>> x = np.array([[0., 1.], ... [2., 3.], ... [4., 5.]]) >>> x.shape(3, 2)>>> x = x.reshape((6, 1)) >>> xarray([[ 0.], [ 1.], [ 2.], [ 3.], [ 4.], [ 5.]])>>> x = x.reshape((2, 3)) >>> xarray([[ 0., 1., 2.], [ 3., 4., 5.]])
A special case of reshaping that’s commonly encountered is transposition.
Transposing a matrix means exchanging its rows and its columns,
so that x[i, :] becomes x[:, i]:
>>> # Creates an all-zeros matrix of shape (300, 20) >>> x = np.zeros((300, 20)) >>> x = np.transpose(x) >>> x.shape(20, 300)
Geometric interpretation of tensor operations
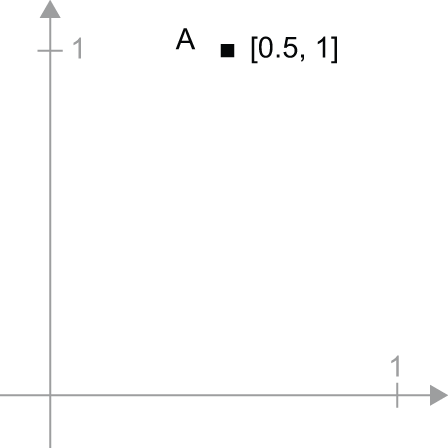
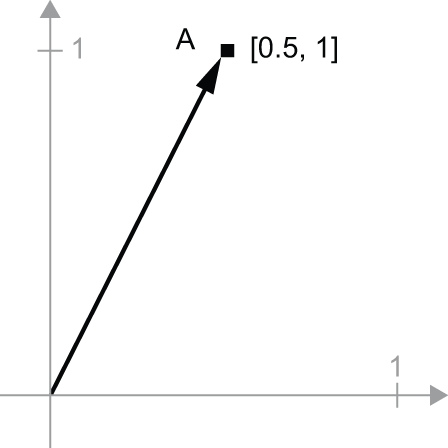
Because the contents of the tensors manipulated by tensor operations can be interpreted as coordinates of points in some geometric space, all tensor operations have a geometric interpretation. For instance, let’s consider addition. We’ll start with the following vector:
A = [0.5, 1]
It’s a point in a 2D space (see figure 2.6). It’s common to picture a vector as an arrow linking the origin to the point, as shown in figure 2.7.
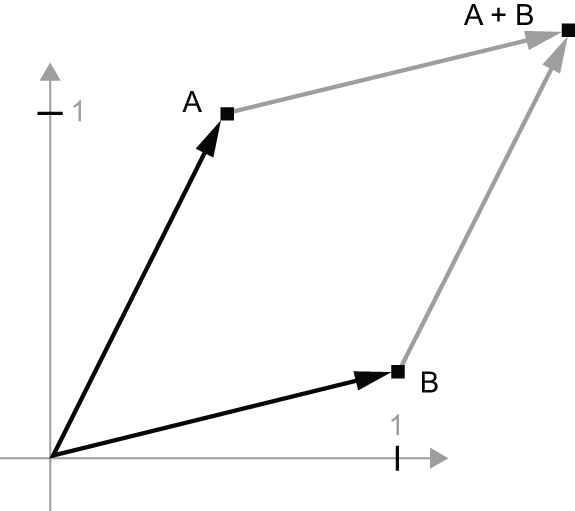
Let’s consider a new point, B = [1, 0.25], which we’ll add to the
previous one. This is done geometrically by chaining together the vector arrows,
with the resulting location being the vector representing the sum of
the previous two vectors (see figure 2.8). As you can see, adding a vector B
to a vector A represents the action of copying point A in new location, whose
distance and direction from the original point A is determined by the vector B.
If you apply the same vector addition to a group of points in the plane (an “object”),
you would be creating a copy of the entire object in a new location (see figure 2.9).
Tensor addition thus represents
the action of translating an object (moving the object without distorting it)
by a certain amount in a certain direction.
In general, elementary geometric operations, such as translation, rotation, scaling, skewing, and so on, can be expressed as tensor operations. Here are a few examples:
- Translation — As you just saw, adding a vector to a point will move this point by a fixed amount in a fixed direction. Applied to a set of points (such as a 2D object), this is called a “translation” (see figure 2.9).
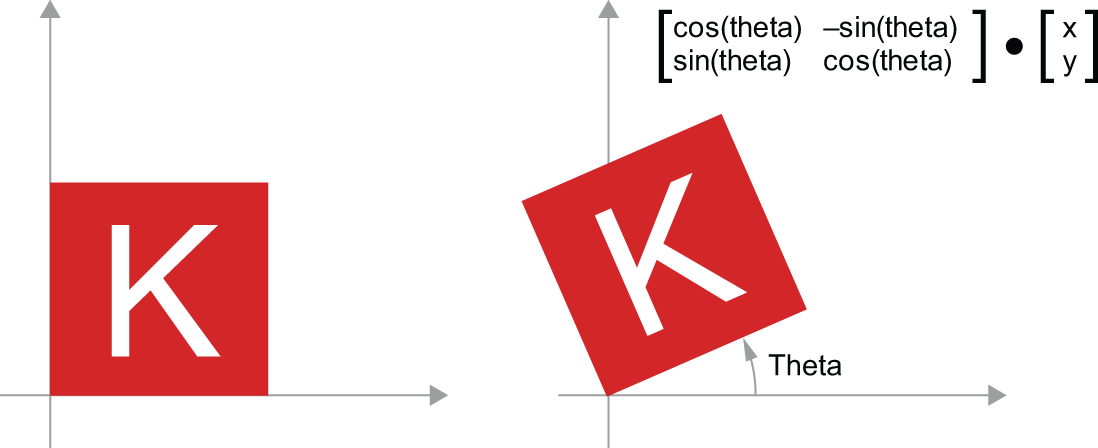
- Rotation — A counterclockwise rotation of a 2D vector by an angle theta (see figure 2.10)
can be achieved via a product with a 2 × 2 matrix
R = [[cos(theta), -sin(theta)], [sin(theta), cos(theta)]].
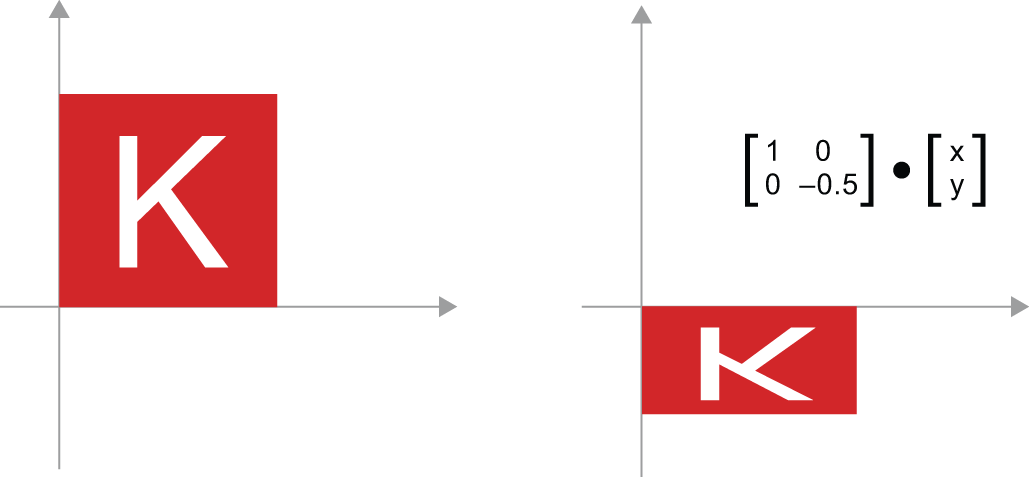
- Scaling — A vertical and horizontal scaling of the image (see figure 2.11)
can be achieved via a product with a 2 × 2 matrix
S = [[horizontal_factor, 0], [0, vertical_factor]](note that such a matrix is called a “diagonal matrix” because it only has non-zero coefficients in its “diagonal,” going from the top left to the bottom right).
- Linear transform — A product with an arbitrary matrix implements a linear transform. Note that scaling and rotation, seen previously, are, by definition, linear transforms.
- Affine transform — An affine transform (see figure 2.12)
is the combination of a linear transform (achieved via a matrix product)
and a translation (achieved via a vector addition).
As you have probably recognized, that’s exactly the
y = W @ x + bcomputation implemented by theDenselayer! ADenselayer without an activation function is an affine layer.
Denselayer withreluactivation — An important observation about affine transforms is that if you apply many of them repeatedly, you still end up with an affine transform (so you could just have applied that one affine transform in the first place). Let’s try it with two:affine2(affine1(x)) = W2 @ (W1 @ x + b1) + b2 = (W2 @ W1) @ x + (W2 @ b1 + b2). That’s an affine transform where the linear part is the matrixW2 @ W1and the translation part is the vectorW2 @ b1 + b2. As a consequence, a multilayer neural network made entirely ofDenselayers without activations would be equivalent to a singleDenselayer. This “deep” neural network would just be a linear model in disguise! This is why we need activation functions, likerelu(seen in action in figure 2.13). Thanks to activation functions, a chain ofDenselayers can be made to implement very complex, nonlinear geometric transformation, resulting in very rich hypothesis spaces for your deep neural networks. We cover this idea in more detail in the next chapter.
relu activation
A geometric interpretation of deep learning
You just learned that neural networks consist entirely of chains of tensor operations and that all of these tensor operations are just simple geometric transformations of the input data. It follows that you can interpret a neural network as a very complex geometric transformation in a high-dimensional space, implemented via a series of simple steps.
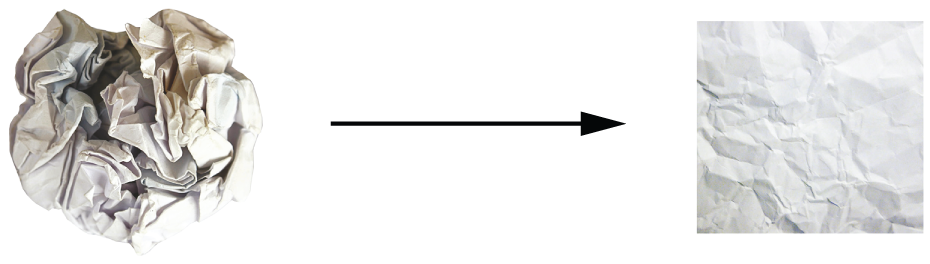
In 3D, the following mental image may prove useful. Imagine two sheets of colored paper: one red and one blue. Put one on top of the other. Now crumple them together into a small ball. That crumpled paper ball is your input data, and each sheet of paper is a class of data in a classification problem. What a neural network is meant to do is figure out a transformation of the paper ball that would uncrumple it to make the two classes cleanly separable again (see figure 2.14). With deep learning, this would be implemented as a series of simple transformations of the 3D space, such as those you could apply on the paper ball with your fingers, one movement at a time.
Uncrumpling paper balls is what machine learning is about: finding neat representations for complex, highly folded data manifolds in high-dimensional spaces (a manifold is a continuous surface, like our crumpled sheet of paper). At this point, you should have a pretty good intuition as to why deep learning excels at this: it takes the approach of incrementally decomposing a complicated geometric transformation into a long chain of elementary ones, which is pretty much the strategy a human would follow to uncrumple a paper ball. Each layer in a deep network applies a transformation that disentangles the data a little — and a deep stack of layers makes tractable an extremely complicated disentanglement process.
The engine of neural networks: Gradient-based optimization
As you saw in the previous section, each neural layer from our first model example transforms its input data as follows:
output = relu(matmul(input, W) + b)
In this expression, W and b are tensors that are attributes of the layer.
They’re called the weights or trainable parameters of the layer
(the kernel and bias attributes, respectively). These weights contain the
information learned by the model from exposure to training data.
Initially, these weight matrices are filled with small random values
(a step called random initialization). Of course, there’s no reason to
expect that relu(matmul(input, W) + b), when W and b are random,
will yield any useful representations. The resulting representations are
meaningless — but they’re a starting point. What comes next is to gradually
adjust these weights, based on a feedback signal. This gradual adjustment,
also called training, is basically the learning that machine learning
is all about.
This happens within what’s called a training loop, which works as follows. Repeat these steps in a loop, until the loss seems sufficiently low:
- Draw a batch of training samples
xand corresponding targetsy_true. - Run the model on
x(a step called the forward pass) to obtain predictionsy_pred. - Compute the loss of the model on the batch, a measure of the mismatch
between
y_predandy_true. - Update all weights of the model in a way that slightly reduces the loss on this batch.
You’ll eventually end up with a model that has a very low loss on its
training data: a low mismatch between predictions y_pred and expected targets
y_true. The model has “learned” to map its inputs to correct targets.
From afar, it may look like magic, but when you reduce it to elementary steps,
it turns out to be simple.
Step 1 sounds easy enough — it’s just I/O code. Steps 2 and 3 are merely the application of a handful of tensor operations, so you could implement these steps purely from what you learned in the previous section. The difficult part is step 4: updating the model’s weights. Given an individual weight coefficient in the model, how can you compute whether the coefficient should be increased or decreased, and by how much?
One naive solution would be to freeze all weights in the model except the one scalar coefficient being considered and try different values for this coefficient. Let’s say the initial value of the coefficient is 0.3. After the forward pass on a batch of data, the loss of the model on the batch is 0.5. If you change the coefficient’s value to 0.35 and rerun the forward pass, the loss increases to 0.6. But if you lower the coefficient to 0.25, the loss falls to 0.4. In this case, it seems that updating the coefficient by –0.05 would contribute to minimizing the loss. This would have to be repeated for all coefficients in the model.
But such an approach would be horribly inefficient because you’d need to compute two forward passes (which are expensive) for every individual coefficient (of which there are many, usually at least a few thousands and potentially up to billions). Thankfully, there’s a much better approach: gradient descent.
Gradient descent is the optimization technique that powers modern neural networks.
Here’s the gist of it. All of the functions used in
our models (such as matmul or +)
transform their input in a smooth and continuous way: if you look at z = x + y,
for instance,
a small change in y only results in a small change in z, and if you know the
direction of the change in y, you can infer the direction of the change in z.
Mathematically, you’d say these functions are differentiable. If you chain
together such functions, the bigger function you obtain is still differentiable.
In particular, this applies to the function that maps the model’s coefficients
to the loss of the model on a batch of data:
a small change of the model’s coefficients
results in a small, predictable change of the loss value. This enables you to
use a mathematical operator called the gradient
to describe how the loss varies as you move the model’s coefficients
in different directions. If you compute this gradient, you can use it to move
the coefficients (all at once in a single update, rather than one at a time)
in a direction that decreases the loss.
If you already know what differentiable means and what a gradient is, you can skip the next two sections. Otherwise, the following will help you understand these concepts.
What’s a derivative?
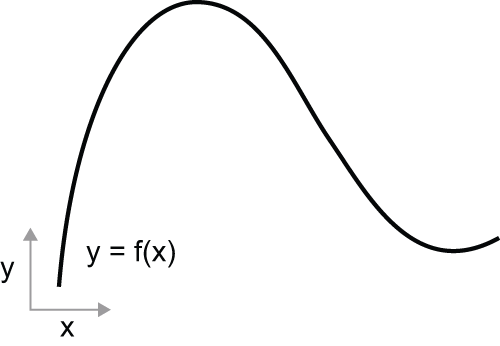
Consider a continuous, smooth function f(x) = y, mapping a number x
to a new number y. We can use the function in figure 2.15 as an example.
Because the function is continuous, a small change
in x can only result in a small change in y — that’s the intuition behind
continuity. Let’s say you increase x by a small factor epsilon_x:
this results in a small epsilon_y change to y, as shown in figure 2.16.
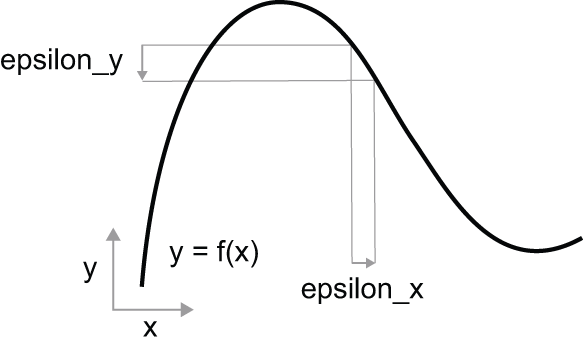
x results in a small change in y.
In addition, because the function is smooth
(its curve doesn’t have any abrupt angles), when epsilon_x is small enough,
around a certain point p, it’s possible to approximate f as
a linear function of slope a, so that epsilon_y becomes a * epsilon_x:
f(x + epsilon_x) = y + a * epsilon_x
Obviously, this linear approximation is valid only when x
is close enough to p.
The slope a is called the derivative of f in p. If a is negative,
it means a small increase in x around p will result in a decrease of f(x),
as shown in figure 2.17, and if a is positive, a small increase in x
will result in an increase of f(x). Further, the absolute value of a
(the magnitude of the derivative) tells you how quickly this increase or
decrease will happen.
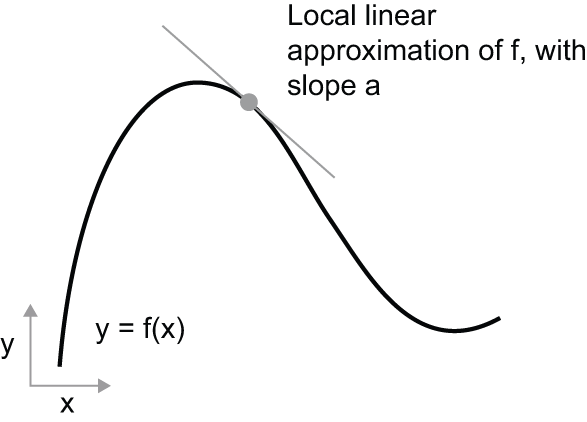
f in p
For every differentiable function f(x) (differentiable means
“can be derived”: for example, smooth, continuous functions can be derived),
there exists a derivative function f'(x) that maps values of x to the
slope of the local linear approximation of f in those points. For instance,
the derivative of cos(x) is -sin(x), the derivative of
f(x) = a * x is f'(x) = a, and so on.
Being able to derive functions is a very powerful tool when it comes to
optimization, the task of finding values of x that minimize the value of f(x).
If you’re trying to update x by a factor epsilon_x
to minimize f(x) and you know the derivative of f,
then your job is done: the derivative completely describes how f(x)
evolves as you change x. If you want to reduce the value of f(x), you just
need to move x a little in the opposite direction from the derivative.
Derivative of a tensor operation: The gradient
The function we were just looking at turned a scalar value x into another scalar
value y: you could plot it as a curve in a 2D plane. Now, imagine a function that turns
a tuple of scalars (x, y) into a scalar value z: that would be a vector operation.
You could plot it as a 2D surface in a 3D space (indexed by coordinates x, y, z).
Likewise, you can imagine functions that take as input matrices, functions that
take as input rank-3 tensors, etc.
The concept of derivation can be applied to any such function, as long as the surfaces they describe are continuous and smooth. The derivative of a tensor operation (or tensor function) is called a gradient. Gradients are just the generalization of the concept of derivatives to functions that take tensors as inputs. Remember how, for a scalar function, the derivative represents the local slope of the curve of the function? In just the same way, the gradient of a tensor function represents the curvature of the multidimensional surface described by the function. It characterizes how the output of the function varies when its input parameters vary.
Let’s look at an example grounded in machine learning. Consider
- An input vector
x(a sample in a dataset) - A matrix
W(the weights of a model) - A target
y_true(what the model should learn to associated tox) - A loss function
loss(meant to measure the gap between the model’s current predictions andy_true).
You can use W to compute a target candidate y_pred and then compute the
loss, or mismatch, between the target candidate y_pred and the target y_true:
# We use the model weights W to make a prediction for x.
y_pred = matmul(x, W)
# We estimate how far off the prediction was.
loss_value = loss(y_pred, y_true)
Now, we’d like to use gradients to figure out how
to update W to make loss_value smaller. How do we do that?
Given fixed inputs x and y_true, the previous operations can be interpreted as
a function mapping values of W (the model’s weights) to loss values:
# f describes the curve (or high-dimensional surface) formed by loss
# values when W varies.
loss_value = f(W)
Let’s say the current value of W is W0. Then the derivative of f
in the point W0 is a tensor grad(loss_value, W0), with the same shape as W,
where each coefficient grad(loss_value, W0)[i, j] indicates the direction and
magnitude of the change in loss_value you observe when modifying W0[i, j].
That tensor grad(loss_value, W0) is the gradient of the function
f(W) = loss_value in W0, also called “gradient of loss_value with respect
to W around W0.”
Concretely, what does grad(loss_value, W0) represent?
You saw earlier that the derivative
of a function f(x) of a single coefficient
can be interpreted as the slope of the curve of f. Likewise,
grad(loss_value, W0)
can be interpreted as the tensor describing the curvature
of loss_value = f(W) around W0. Each partial derivative describes the
curvature of f in a specific direction.
We just saw how for a function f(x), you can reduce the value of f(x) by moving x a little
in the opposite direction from the derivative. In much the same way, with a
function f(W) of a tensor, you can reduce loss_value = f(W) by moving W
in the opposite direction from the gradient, such as an update of
W1 = W0 - step * grad(f(W0), W0) where step is a small scaling factor. That means going against
the curvature, which intuitively should put you lower on the curve.
Note that the scaling factor step is needed because grad(loss_value, W0)
only approximates the curvature when you’re close to W0,
so you don’t want to get too far from W0.
Stochastic gradient descent
Given a differentiable function, it’s theoretically possible to find its minimum analytically: it’s known that a function’s minimum is a point where the derivative is 0, so all you have to do is find all the points where the derivative goes to 0 and check for which of these points the function has the lowest value.
Applied to a neural network, that means finding analytically the combination
of weight values that yields the smallest possible loss function. This can
be done by solving the equation grad(f(W), W) = 0 for W. This is a
polynomial equation of N variables, where N is the number of coefficients
in the model. Although it would be possible to solve such an equation
for N = 2 or N = 3, doing so is intractable for real neural networks,
where the number of parameters is never less than a few thousand
and can sometimes be in the billions.
Instead, you can use the four-step algorithm outlined at the beginning of this section: modify the parameters little by little based on the current loss value on a random batch of data. Because you’re dealing with a differentiable function, you can compute its gradient, which gives you an efficient way to implement step 4. If you update the weights in the opposite direction from the gradient, the loss will be a little less every time:
- Draw a batch of training samples
xand corresponding targetsy_true. - Run the model on
xto obtain predictionsy_pred(this is called the forward pass). - Compute the loss of the model on the batch, a measure of the
mismatch between
y_predandy_true. - Compute the gradient of the loss with regard to the model’s parameters (this is called the backward pass).
- Move the parameters a little in the opposite direction from the gradient —
for example,
W -= learning_rate * gradient— thus reducing the loss on the batch a bit. The learning rate (learning_ratehere) would be a scalar factor modulating the “speed” of the gradient descent process.
Easy enough! What we just described is called mini-batch stochastic gradient descent (mini-batch SGD). The term stochastic refers to the fact that each batch of data is drawn at random (stochastic is a scientific synonym of random). Figure 2.18 illustrates what happens in 1D, when the model has only one parameter and you have only one training sample.
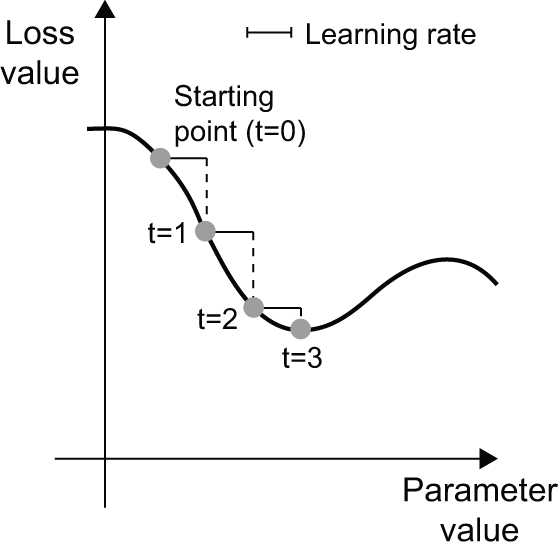
We can see intuitively that it’s important to pick a reasonable value
for the learning_rate factor. If it’s too small, the descent down the curve will
take many iterations, and it could get stuck in a local minimum.
If learning_rate is too large, your updates may end up taking you to completely
random locations on the curve.
Note that a variant of the mini-batch SGD algorithm would be to draw a single sample and target at each iteration, rather than drawing a batch of data. This would be true SGD (as opposed to mini-batch SGD). Alternatively, going to the opposite extreme, you could run every step on all data available, which is called batch gradient descent. Each update would then be more accurate, but far more expensive. The efficient compromise between these two extremes is to use mini-batches of reasonable size.
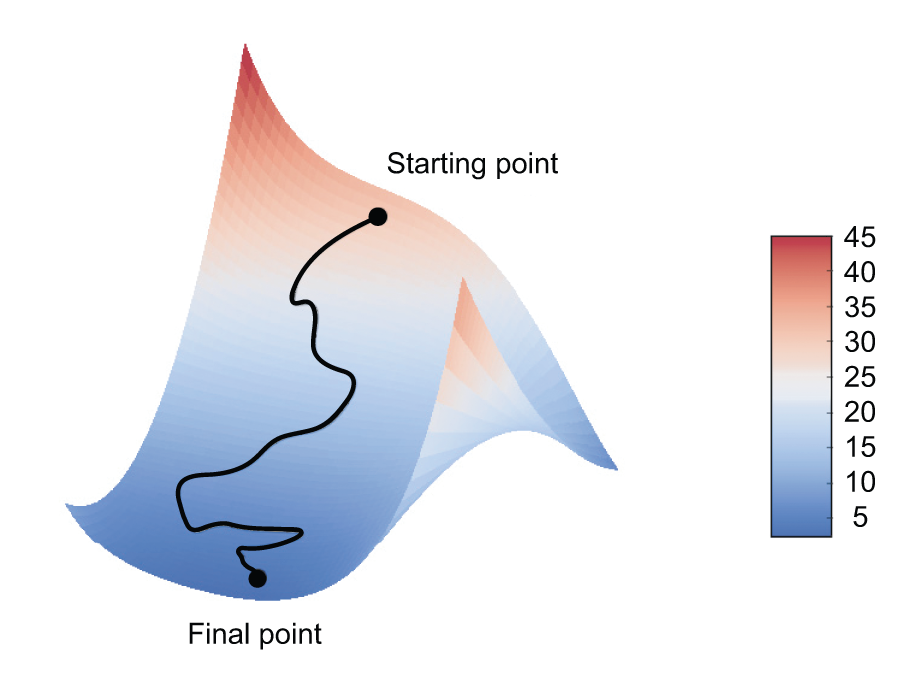
Although figure 2.18 illustrates gradient descent in a 1D parameter space, in practice, you’ll use gradient descent in highly dimensional spaces: every weight coefficient in a neural network is a free dimension in the space, and there may be tens of thousands or even millions of them. To help you build intuition about loss surfaces, you can also visualize gradient descent along a 2D loss surface, as shown in figure 2.19. But you can’t possibly visualize what the actual process of training a neural network looks like — you can’t represent a 1,000,000-dimensional space in a way that makes sense to humans. As such, it’s good to keep in mind that the intuitions you develop through these low-dimensional representations may not always be accurate in practice. This has historically been a source of issues in the world of deep learning research.
Additionally, there exist multiple variants of SGD that differ by taking into account previous weight updates when computing the next weight update, rather than just looking at the current value of the gradients. There is, for instance, SGD with momentum, as well as Adagrad, RMSprop, and several others. Such variants are known as optimization methods or optimizers. In particular, the concept of momentum, which is used in many of these variants, deserves your attention. Momentum addresses two issues with SGD: convergence speed and local minima. Consider figure 2.20, which shows the curve of a loss as a function of a model parameter.
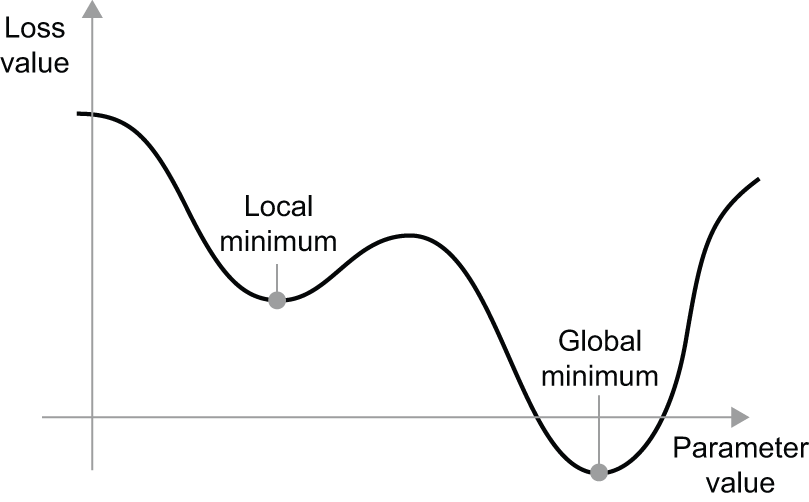
As you can see, around a certain parameter value, there is a local minimum: around that point, moving left would result in the loss increasing, but so would moving right. If the parameter under consideration were being optimized via SGD with a small learning rate, then the optimization process would get stuck at the local minimum instead of making its way to the global minimum.
You can avoid such issues by using momentum, which draws inspiration
from physics. A useful mental image here is to think of the optimization
process as a small ball rolling down the loss curve. If it has enough momentum,
the ball won’t get stuck in a ravine and will end up at the global minimum.
Momentum is implemented by moving the ball at each step based not only
on the current slope value (current acceleration) but also on the
current velocity (resulting from past acceleration). In practice, this means
updating the parameter w based not only on the current gradient value but
also on the previous parameter update, such as in this naive implementation:
past_velocity = 0.0
# Constant momentum factor
momentum = 0.1
# Optimization loop
while loss > 0.01:
w, loss, gradient = get_current_parameters()
velocity = past_velocity * momentum - learning_rate * gradient
w = w + momentum * velocity - learning_rate * gradient
past_velocity = velocity
update_parameter(w)
Chaining derivatives: The Backpropagation algorithm
In the previously discussed algorithm, we casually assumed that because a function is differentiable, we can easily compute its gradient. But is that true? How can we compute the gradient of complex expressions in practice? In our two-layer network example, how can we get the gradient of the loss with regard to the weights? That’s where the Backpropagation algorithm comes in.
The chain rule
Backpropagation is a way to use the derivative of simple operations
(such as addition, relu, or tensor product) to easily compute the gradient
of arbitrarily complex combinations of these atomic operations.
Crucially, a neural network consists of many tensor operations
chained together, each of which has a simple, known derivative. For instance,
the model from our first example can be expressed as a function
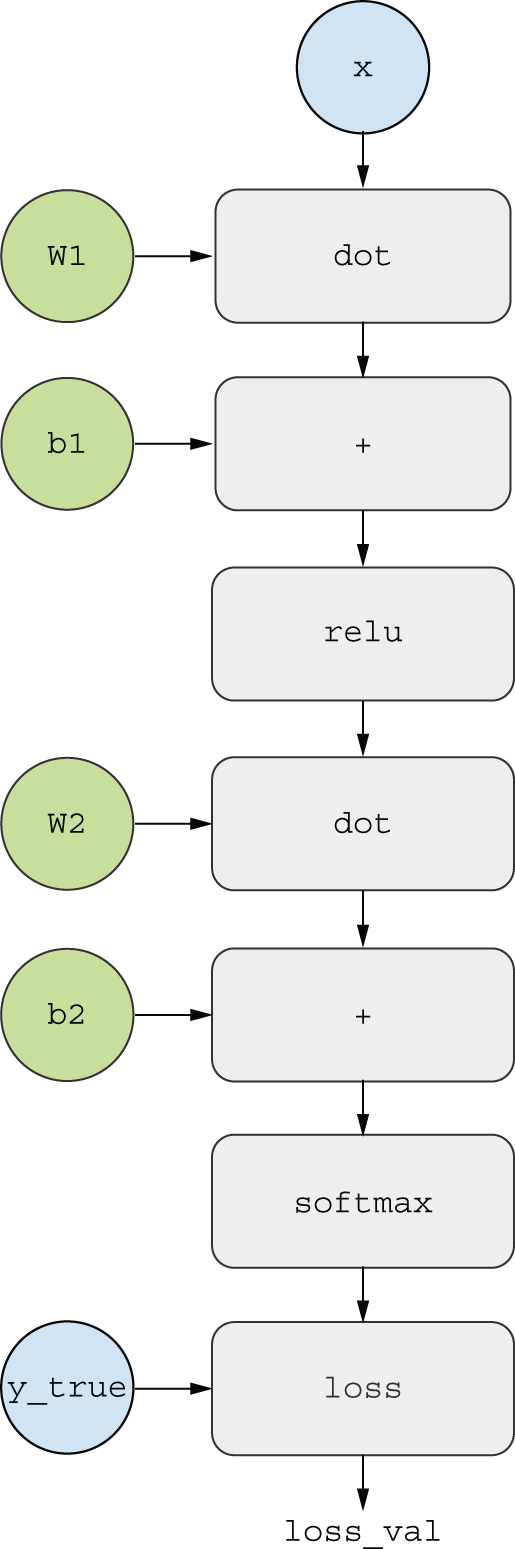
parameterized by the variables W1, b1, W2, and b2
(belonging to the first and second Dense layers, respectively), involving
the atomic operations matmul, relu, softmax, and +, as well as our
loss function, loss, which are all easily differentiable:
loss_value = loss(
y_true,
softmax(matmul(relu(matmul(inputs, W1) + b1), W2) + b2),
)
Calculus tells us that such a chain of functions can be derived using
the following identity, called the chain rule.
Consider two functions f and g, as well as the composed function
fg such that y = fg(x) == f(g(x)):
def fg(x):
x1 = g(x)
y = f(x1)
return y
Then the chain rule states that grad(y, x) == grad(y, x1) * grad(x1, x).
This enables you to compute the derivative of fg as long as you know
the derivatives of f and g.
The chain rule is named like this because when you add more intermediate
functions, it starts looking like a chain:
def fghj(x):
x1 = j(x)
x2 = h(x1)
x3 = g(x2)
y = f(x3)
return y
grad(y, x) == grad(y, x3) * grad(x3, x2) * grad(x2, x1) * grad(x1, x)
Applying the chain rule to the computation of the gradient values of a neural network gives rise to an algorithm called backpropagation. Let’s see how that works, concretely.
Automatic differentiation with computation graphs
A useful way to think about backpropagation is in terms of computation graphs. A computation graph is the data structure at the heart of the deep learning revolution. It’s a directed acyclic graph of operations — in our case, tensor operations. For instance, figure 2.21 is the graph representation of our first model.
Computation graphs have been an extremely successful abstraction in
computer science because they enable us to treat computation as data:
a computable expression is encoded as a machine-readable data structure
that can be used as the input or output of another program. For instance,
you could imagine a program that receives a computation graph and returns
a new computation graph that implements a large-scale distributed version
of the same computation — this would mean that you could distribute
any computation without having to write the distribution logic yourself. Or
imagine ... a program that receives a computation graph and can automatically
generate the derivative of the expression it represents. It’s much easier to do
these things if your computation is expressed as an explicit graph
data structure rather than, say, lines of ASCII characters in a .py file.
To explain backpropagation clearly,
let’s look at a really basic example of a computation graph.
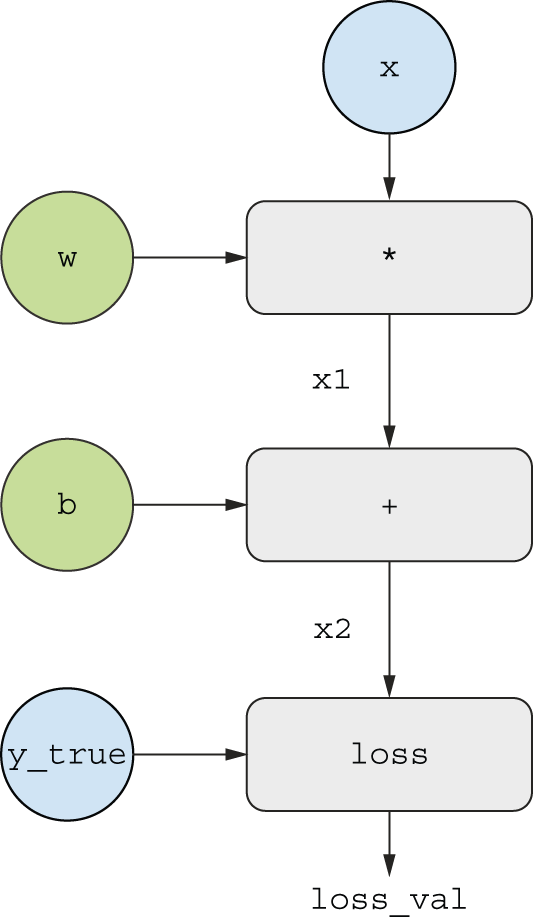
We’ll consider a simplified version of the graph in figure 2.21, where we only have one
linear layer and where all variables are scalar, shown in figure 2.22. We’ll take two scalar variables
w, b, a scalar input x,
and apply some operations to them to combine into an output y. Finally,
we’ll apply an absolute value error loss function:
loss_val = abs(y_true - y). Since we want to update w and b in a way
that would minimize loss_val, we are interested in computing
grad(loss_val, b) and grad(loss_val, w).
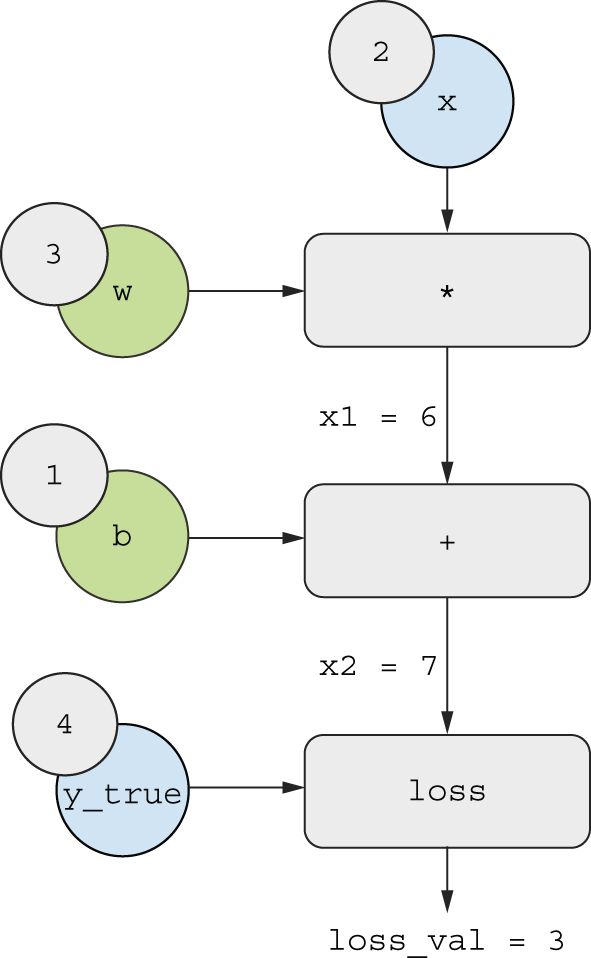
Let’s set concrete values for the “input nodes” in the graph —
that is, the input x, the target y_true, w and b (figure 2.23).
We propagate these values to all nodes in the graph, from top to bottom,
until we reach loss_val. This is the forward pass.
Now let’s “reverse” the graph: for each edge in the graph going from A
to B, we will create an opposite edge from B to A, and ask, “How much does
B vary when A varies?” That is, what is grad(B, A)? We’ll annotate
each inverted edge with this value (figure 2.24).
This backward graph represents the backward pass.
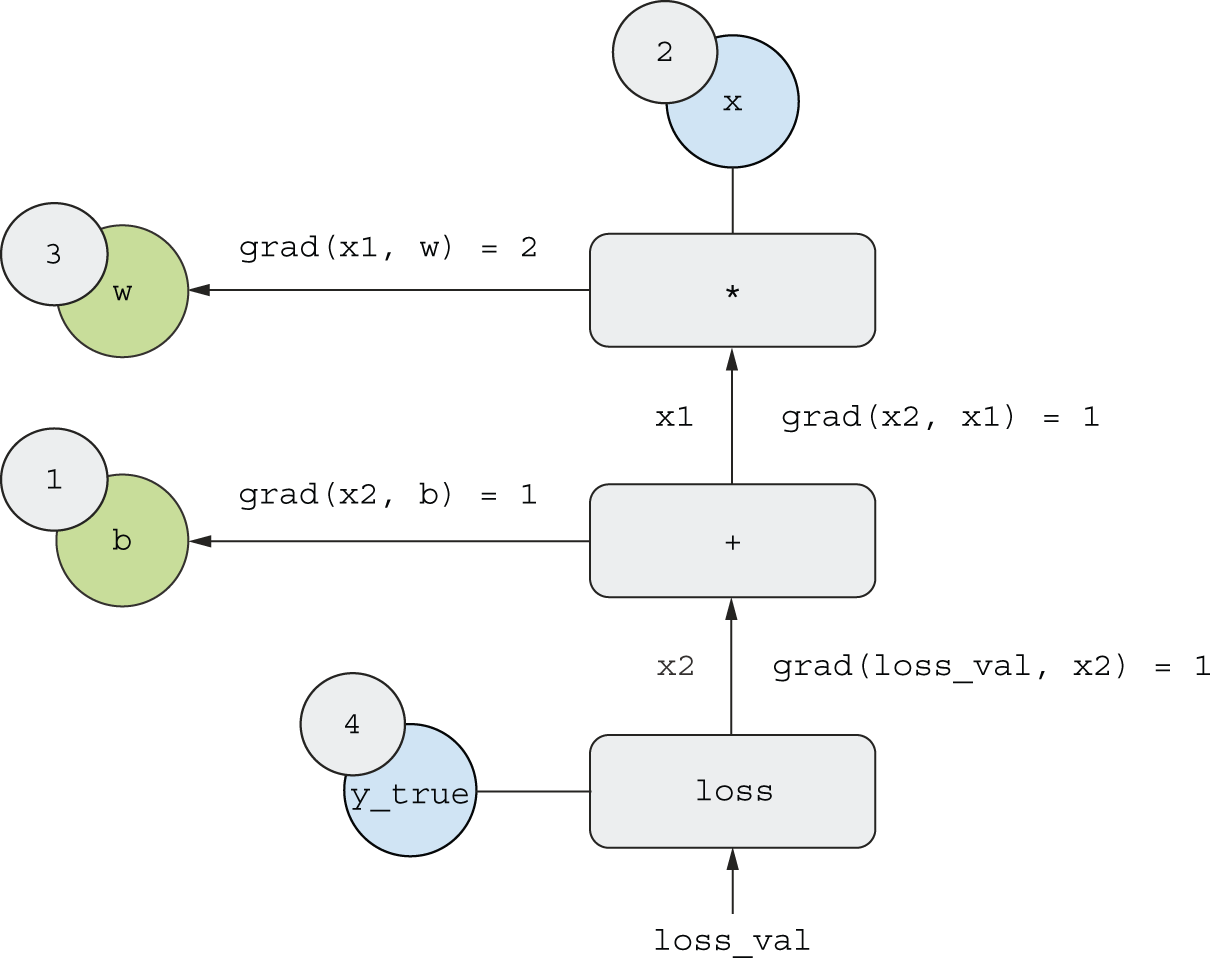
We have
grad(loss_val, x2) = 1because asx2varies by an amount epsilon,loss_val = abs(4 - x2)varies by the same amount.grad(x2, x1) = 1because asx1varies by an amount epsilon,x2 = x1 + b = x1 + 1varies by the same amount.grad(x2, b) = 1because asbvaries by an amount epsilon,x2 = x1 + b = 6 + bvaries by the same amount.grad(x1, w) = 2because aswvaries by an amount epsilon,x1 = x * w = 2 * wvaries by2 * epsilon.
What the chain rule says about this backward graph is that you can obtain
the derivative of a node with respect to another node by
multiplying the derivatives for each edge along the path linking the two nodes.
For instance,
grad(loss_val, w) = grad(loss_val, x2) * grad(x2, x1) * grad(x1, w).
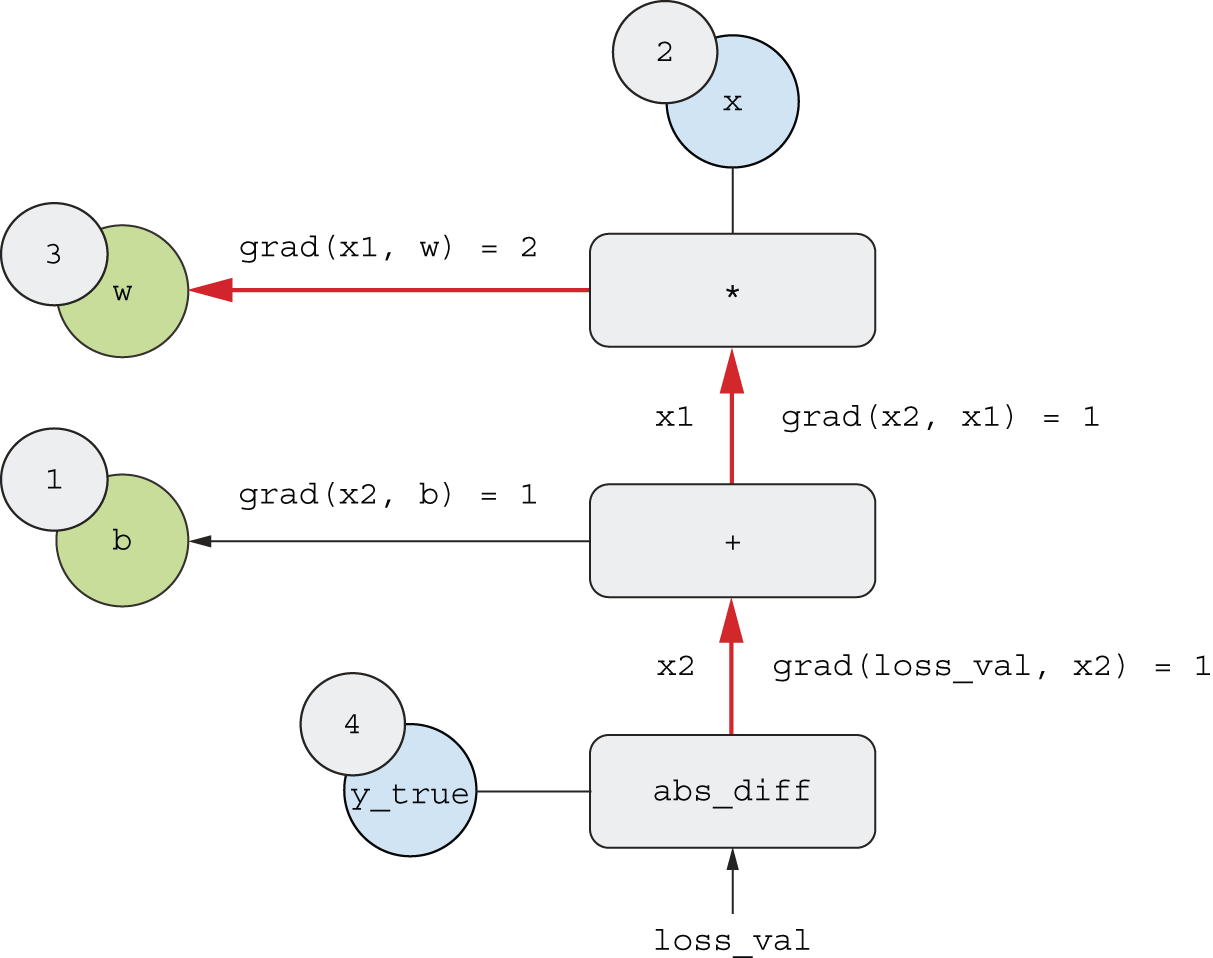
loss_val to w in the backward graph
By applying the chain rule to our graph, we obtain what we were looking for:
grad(loss_val, w) = 1 * 1 * 2 = 2grad(loss_val, b) = 1 * 1 = 1
And with that, you just saw backpropagation in action! Backpropagation is simply the application of the chain rule to a computation graph. There’s nothing more to it. Backpropagation starts with the final loss value and works backward from the top layers to the bottom layers, computing the contribution that each parameter had in the loss value. That’s where the name “backpropagation” comes from: we “back propagate” the loss contributions of different nodes in a computation graph.
Nowadays, people implement neural networks in modern frameworks that are capable of automatic differentiation, such as JAX, TensorFlow, and PyTorch. Automatic differentiation is implemented with the kind of computation graph previously presented. Automatic differentiation makes it possible to retrieve the gradients of arbitrary compositions of differentiable tensor operations without doing any extra work besides writing down the forward pass. When I wrote my first neural networks in C in the 2000s, I had to write my gradients by hand. Now, thanks to modern automatic differentiation tools, you’ll never have to implement backpropagation yourself. Consider yourself lucky!
Looking back at our first example
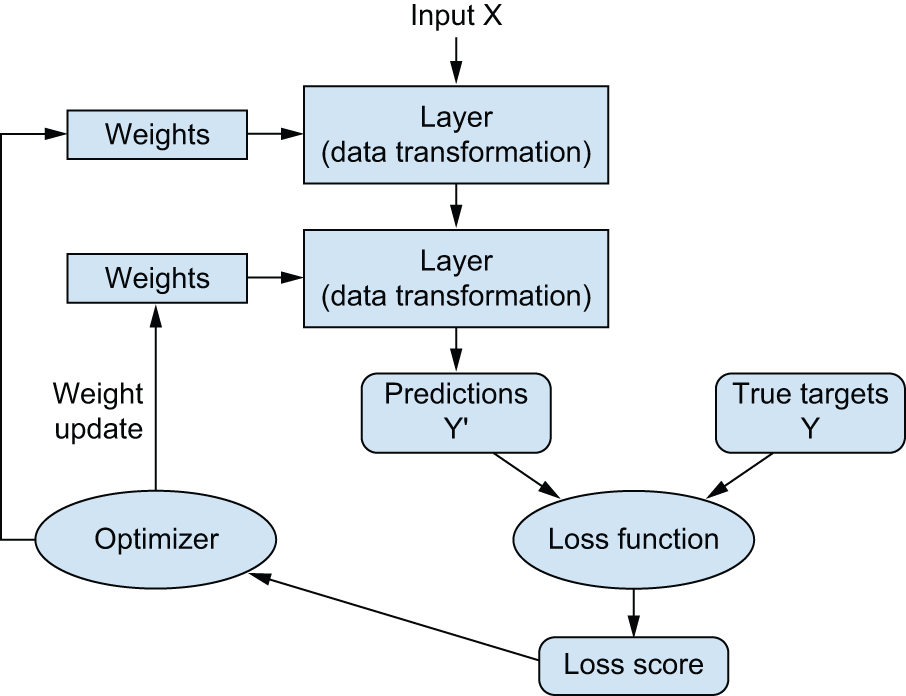
You’re nearing the end of this chapter, and you should now have a general understanding of what’s going on behind the scenes in a neural network. What was a magical black box at the start of the chapter has turned into a clearer picture, as illustrated in figure 2.26: the model, composed of layers that are chained together, maps the input data to predictions. The loss function then compares these predictions to the targets, producing a loss value: a measure of how well the model’s predictions match what was expected. The optimizer uses this loss value to update the model’s weights.
Let’s go back to the first example and review each piece of it in the light of what you’ve learned in the previous sections.
This was the input data:
(train_images, train_labels), (test_images, test_labels) = mnist.load_data()
train_images = train_images.reshape((60000, 28 * 28))
train_images = train_images.astype("float32") / 255
test_images = test_images.reshape((10000, 28 * 28))
test_images = test_images.astype("float32") / 255
Now you understand that the input images are stored in NumPy tensors,
which are here formatted as float32 tensors of shape (60000, 784)
(training data) and (10000, 784) (test data), respectively.
This was our model:
model = keras.Sequential(
[
layers.Dense(512, activation="relu"),
layers.Dense(10, activation="softmax"),
]
)
Now you understand that this model consists of a chain of two Dense layers,
that each layer applies a few simple tensor operations to the input data,
and that these operations involve weight tensors. Weight tensors, which
are attributes of the layers, are where the knowledge of the model persists.
This was the model-compilation step:
model.compile(
optimizer="adam",
loss="sparse_categorical_crossentropy",
metrics=["accuracy"],
)
Now you understand that "sparse_categorical_crossentropy" is the loss function
that’s used as a feedback signal for learning the weight tensors, which
the training phase will attempt to minimize. You also know that this reduction
of the loss happens via mini-batch stochastic gradient descent.
The exact rules governing a specific use of gradient descent are defined
by the "adam" optimizer passed as the first argument.
Finally, this was the training loop:
model.fit(
train_images,
train_labels,
epochs=5,
batch_size=128,
)
Now you understand what happens when you call fit: the model will start
to iterate on the training data in mini-batches of 128 samples,
5 times over (each iteration over all the training data is called an epoch).
For each batch, the model will compute the gradient of the loss
with regard to the weights (using the Backpropagation algorithm, which derives
from the chain rule in calculus) and move the weights in the direction
that will reduce the value of the loss for this batch.
After these 5 epochs, the model will have performed 2,345 gradient updates (469 per epoch), and the loss of the model will be sufficiently low that the model will be capable of classifying handwritten digits with high accuracy.
At this point, you already know most of what there is to know about neural networks. Let’s prove it by reimplementing a simplified version of that first example step by step, using only low-level operations.
Reimplementing our first example from scratch
What’s better to demonstrate full, unambiguous understanding than to implement everything from scratch? Of course, what “from scratch” means here is relative: we won’t reimplement basic tensor operations, and we won’t implement backpropagation. But we’ll go to such a low level that each computation step will be made explicit.
Don’t worry if you don’t understand every little detail in this example just yet. The next chapter will dive in more detail into the Keras API. For now, just try to follow the gist of what’s going on — the intent of this example is to help crystallize your understanding of the mathematics of deep learning using a concrete implementation. Let’s go!
A simple Dense class
You’ve learned earlier that the Dense layer implements the following
input transformation, where W and b are model parameters, and activation
is an element-wise function (usually relu):
output = activation(matmul(input, W) + b)
Let’s implement a simple Python class NaiveDense that creates two Keras
variables W and b, and exposes a __call__() method
that applies the previous transformation:
# keras.ops is where you will find all the tensor operations you need.
import keras
from keras import ops
class NaiveDense:
def __init__(self, input_size, output_size, activation=None):
self.activation = activation
self.W = keras.Variable(
# Creates a matrix W of shape (input_size, output_size),
# initialized with random values drawn from a uniform
# distribution
shape=(input_size, output_size), initializer="uniform"
)
# Creates a vector b of shape (output_size,), initialized with
# zeros
self.b = keras.Variable(shape=(output_size,), initializer="zeros")
# Applies the forward pass
def __call__(self, inputs):
x = ops.matmul(inputs, self.W)
x = x + self.b
if self.activation is not None:
x = self.activation(x)
return x
@property
# The convenience method for retrieving the layer's weights
def weights(self):
return [self.W, self.b]
A simple Sequential class
Now, let’s create a NaiveSequential class to chain these layers. It wraps a list
of layers and exposes a __call__() method that simply calls the underlying
layers on the inputs, in order. It also features a weights property to easily
keep track of the layers’ parameters:
class NaiveSequential:
def __init__(self, layers):
self.layers = layers
def __call__(self, inputs):
x = inputs
for layer in self.layers:
x = layer(x)
return x
@property
def weights(self):
weights = []
for layer in self.layers:
weights += layer.weights
return weights
Using this NaiveDense class and this NaiveSequential class, we can create
a mock Keras model:
model = NaiveSequential(
[
NaiveDense(input_size=28 * 28, output_size=512, activation=ops.relu),
NaiveDense(input_size=512, output_size=10, activation=ops.softmax),
]
)
assert len(model.weights) == 4
A batch generator
Next, we need a way to iterate over the MNIST data in mini-batches. This is easy:
import math
class BatchGenerator:
def __init__(self, images, labels, batch_size=128):
assert len(images) == len(labels)
self.index = 0
self.images = images
self.labels = labels
self.batch_size = batch_size
self.num_batches = math.ceil(len(images) / batch_size)
def next(self):
images = self.images[self.index : self.index + self.batch_size]
labels = self.labels[self.index : self.index + self.batch_size]
self.index += self.batch_size
return images, labels
Running one training step
The most difficult part of the process is the “training step”: updating the weights of the model after running it on one batch of data. We need to
- Compute the predictions of the model for the images in the batch
- Compute the loss value for these predictions given the actual labels
- Compute the gradient of the loss with regard to the model’s weights
- Move the weights by a small amount in the direction opposite to the gradient
def one_training_step(model, images_batch, labels_batch):
# Runs the "forward pass"
predictions = model(images_batch)
loss = ops.sparse_categorical_crossentropy(labels_batch, predictions)
average_loss = ops.mean(loss)
# Computes the gradient of the loss with regard to the weights. The
# output, gradients, is a list where each entry corresponds to a
# weight from the model.weights list. We haven't defined this
# function yet!
gradients = get_gradients_of_loss_wrt_weights(loss, model.weights)
# Updates the weights using the gradients. We haven't defined this
# function yet!
update_weights(gradients, model.weights)
return loss
The weight update step
As you already know, the purpose of the “weight update” step
(represented by the update_weights() function) is to
move the weights by “a bit” in a direction that will reduce the loss on this
batch. The magnitude of the move is determined by the “learning rate,” typically
a small quantity. The simplest way to implement this update_weights() function
is to subtract gradient * learning_rate from each weight:
learning_rate = 1e-3
def update_weights(gradients, weights):
for g, w in zip(gradients, weights):
# Assigns a new value to the variable, in place
w.assign(w - g * learning_rate)
In practice, you will almost never implement a weight update step like this by
hand. Instead, you would use an Optimizer instance from Keras — like this:
from keras import optimizers
optimizer = optimizers.SGD(learning_rate=1e-3)
def update_weights(gradients, weights):
optimizer.apply_gradients(zip(gradients, weights))
Gradient computation
Now, there’s just one thing we’re still missing: gradient computation
(represented by the get_gradients_of_loss_wrt_weights() function in listing 2.9). In the previous section,
we outlined how we could use the chain rule to obtain the gradients of a chain of functions
given their individual derivatives, a process known as backpropagation. We could reimplement
backpropagation from scratch here, but that would be rather cumbersome, especially since
we’re using a softmax operation and a crossentropy loss, which have fairly verbose derivatives.
Instead, we can rely on the automatic differentiation mechanism that’s built into one of the low-level frameworks supported by Keras, such as TensorFlow, JAX, or PyTorch. For the sake of the example, let’s go with TensorFlow here. You’ll learn more about TensorFlow, JAX, and PyTorch in the next chapter.
The API through which you can use TensorFlow’s
automatic differentiation capabilities is the tf.GradientTape object.
It’s a Python scope that will “record” the tensor operations that run
inside it, in the form of a computation graph (sometimes called a tape).
This graph can then be used to retrieve the gradient
of any scalar value with respect to any set of input values:
import tensorflow as tf
# Instantiates a scalar tensor with value 0
x = tf.zeros(shape=())
# Opens a GradientTape scope
with tf.GradientTape() as tape:
# Inside the scope, applies some tensor operations to our variable
y = 2 * x + 3
# Uses the tape to retrieve the gradient of the output y with respect
# to our variable x
grad_of_y_wrt_x = tape.gradient(y, x)
Let’s rewrite our function one_training_step() using the TensorFlow GradientTape
(skipping the need for a separate get_gradients_of_loss_wrt_weights() function):
def one_training_step(model, images_batch, labels_batch):
with tf.GradientTape() as tape:
predictions = model(images_batch)
loss = ops.sparse_categorical_crossentropy(labels_batch, predictions)
average_loss = ops.mean(loss)
gradients = tape.gradient(average_loss, model.weights)
update_weights(gradients, model.weights)
return average_loss
Now that our per-batch training step is ready, we can move on to implementing an entire epoch of training.
The full training loop
An epoch of training simply consists of the repetition of the training step for each batch in the training data, and the full training loop is simply the repetition of one epoch:
def fit(model, images, labels, epochs, batch_size=128):
for epoch_counter in range(epochs):
print(f"Epoch {epoch_counter}")
batch_generator = BatchGenerator(images, labels)
for batch_counter in range(batch_generator.num_batches):
images_batch, labels_batch = batch_generator.next()
loss = one_training_step(model, images_batch, labels_batch)
if batch_counter % 100 == 0:
print(f"loss at batch {batch_counter}: {loss:.2f}")
Let’s test-drive it:
from keras.datasets import mnist
(train_images, train_labels), (test_images, test_labels) = mnist.load_data()
train_images = train_images.reshape((60000, 28 * 28))
train_images = train_images.astype("float32") / 255
test_images = test_images.reshape((10000, 28 * 28))
test_images = test_images.astype("float32") / 255
fit(model, train_images, train_labels, epochs=10, batch_size=128)
Evaluating the model
We can evaluate the model by taking the argmax of its predictions
over the test images, and comparing it to the expected labels:
>>> predictions = model(test_images) >>> predicted_labels = ops.argmax(predictions, axis=1) >>> matches = predicted_labels == test_labels >>> f"accuracy: {ops.mean(matches):.2f}"accuracy: 0.83
All done! As you can see, it’s quite a bit of work to do “by hand” what you
can do in a few lines of Keras code. But because you’ve gone through these
steps, you should now have a crystal-clear understanding of what goes on inside
a neural network when you call fit(). Having this low-level mental model
of what your code is doing behind the scenes will make you better able to
take advantage of the high-level features of the Keras API.
Summary
- Tensors form the foundation of modern machine learning systems. They come in
various flavors of
dtype,rank, andshape.
- You can manipulate numerical tensors via tensor operations (such as addition, tensor product, or element-wise multiplication), which can be interpreted as encoding geometric transformations. In general, everything in deep learning is amenable to a geometric interpretation.
- Deep learning models consist of chains of simple tensor operations, parameterized by weights, which are themselves tensors. The weights of a model are where its “knowledge” is stored.
- Learning means finding a set of values for the model’s weights that minimizes a loss function for a given set of training data samples and their corresponding targets.
- Learning happens by drawing random batches of data samples and their targets and computing the gradient of the model parameters with respect to the loss on the batch. The model parameters are then moved a bit (the magnitude of the move is defined by the learning rate) in the opposite direction from the gradient. This is called mini-batch gradient descent.
- The entire learning process is made possible by the fact that all tensor operations in neural networks are differentiable, and thus it’s possible to apply the chain rule of derivation to find the gradient function mapping the current parameters and current batch of data to a gradient value. This is called backpropagation.
- Two key concepts you’ll see frequently in future chapters are loss and
optimizers. These are the two things you need to define before you begin
feeding data into a model:
- The loss is the quantity you’ll attempt to minimize during training, so it should represent a measure of success for the task you’re trying to solve.
- The optimizer specifies the exact way in which the gradient of the loss will be used to update parameters: for instance, it could be the RMSProp optimizer, SGD with momentum, and so on.